
Diese Website nutzt Cookies, um u. a. anonymisierte Statistiken zu erheben. Weitere Informationen

Die GNSS-Daten gewöhnlicher Drohnen sind fehlerbehaftet. Um in der Photogrammetrie eine hohe Präzision gewährleisten zu können, werden RTK-Korrekturdaten nahegelegener Bodenstationen herangezogen. So können auch absolute Positionen exakt bestimmt werden.
1 Global Navigation Satellite Systems
Für die photogrammetrische Auswertung eines Projekts müssen georeferenzierte Bilder herangezogen werden. Dies bedeutet, dass in den Metadaten der Aufnahmen Informationen zu Standort und Ausrichtung der Kamera hinterlegt sein müssen. Nur so kann die Software die Bilder zuordnen, wiederkehrende Punkte erkennen und daraus eine Punktwolke erstellen.
Für die Bestimmung des eigenen Standorts werden Global Navigation Satellite Systems (GNSS), also satellitengestütze Navigationssysteme genutzt. Weit verbreitet sind insbesondere GPS (USA), GLONASS (Russland), Galileo (Europa), Beidou (China) oder QZSS (Japan). Gänge Drohnen sind hierzu mit passender Antenne und Kompass ausgestattet, die zum einen eine stabile Fluglage gewährleisten, zum anderen aber aufgenommene Bilder mit entsprechenden Metadaten versehen.
2 Relative und Absolute Genauigkeit
Die GNSS-Signale zwischen Satellit und Drohne müssen hohe Entfernungen zurücklegen. Dabei durchqueren sie die Ionosphäre, den Teil der Atmosphäre, der große Mengen an elektrisch geladenen Teilchen enthält. Diese wiederum beeinflussen die Geschwindigkeit des GNSS-Signals, es entsteht eine Verzögerung, die den relevantesten Fehler der an der Drohne empfangenen GNSS-Daten darstellt.
Dennoch sind handelsübliche Drohnen in der Lage, mit Hilfe dieses fehlerbehafteten Signals eine stabile Fluglage zu garantieren. Ursache hierfür ist, dass zeitlich und örtlich nahe GNSS-Signale ähnliche Fehler aufweisen. Das heißt, zwei in einem kurzen zeitlichen Abstand aufgenommene GNSS-Signale weisen einen ähnlichen Fehler auf, sprich eine ausreichende relative Genauigkeit ist gegeben. Dasselbe gilt für zwei in einem geringen örtlichen Abstand aufgenommene GNSS-Signale. So sind auch einfache Drohnen schon in der Lage, über photogrammetrische Berechnungen recht genaue relative Messungen z. B. für Längen oder Flächen durchzuführen.
Die absolute Genauigkeit der GNSS-Signale ist dagegen zu gering, um zuverlässige Werte zu erfassen. Dabei sind absolute Messwerte insbesondere in der Vermessungsindustrie von großer Bedeutung.
3 Real Time Kinematik
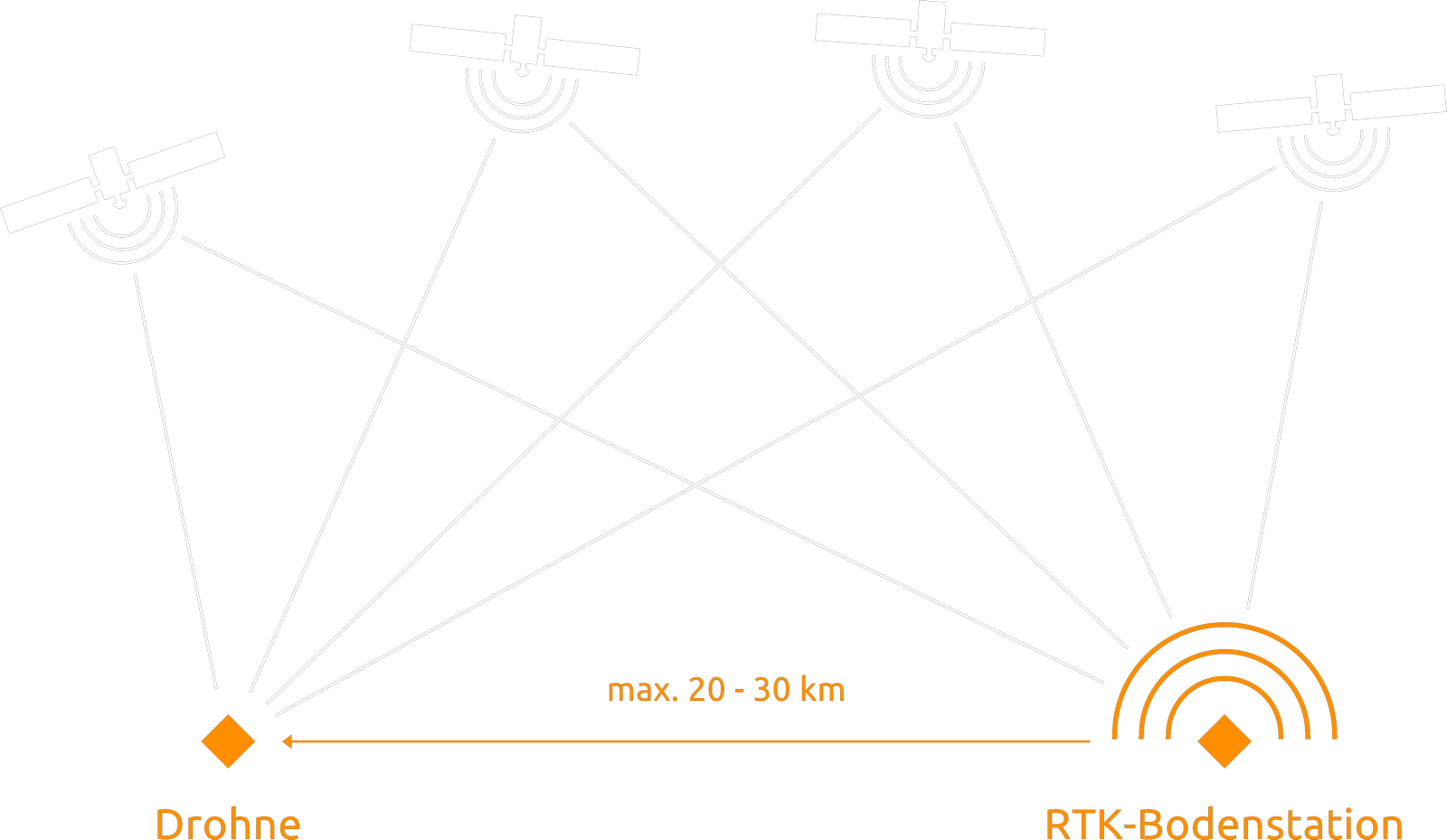
Real-Time-Kinematik (RTK), auch Echtzeitkinematik, bietet hier eine Lösung. Nahegelegene, eingemessene Bodenstationen mit bereits bekannten Geoinformationen empfangen GNSS-Signale und gleichen diese mit den vorhandenen Werten ab. Daraus kann der aktuelle Fehler des jeweiligen Signals berechnet werden. Über Mobilfunk werden eingewählten Nutzern Korrekturdaten zur Verfügung gestellt, die in einem festen Gebiet (maximal etwa 20 bis 30 km) um die Bodenstation gültig sind, da die Fehler hier annähernd übereinstimmen. Die eigene Drohne kann die Korrekturwerte mit einbeziehen und so besonders präzise Geoinformationen mit hoher absoluter Genauigkeit in die Metadaten der eigenen Bilder abspeichern.
SAPOS ist als gemeinsames Projekt der Landesvermessungsämter eines der in Deutschland am meisten genutzten Netzwerke für Echtzeit-Korrekturdaten, insgesamt werden über 270 Stationen betrieben. Alternativ können auch mobile Bodenstationen eingesetzt werden, die zunächst eingemessen werden und anschließend ein lokales Netzwerk für Korrekturdaten erzeugen. Aufgrund des hohen Aufwandes werden derartige Systeme jedoch häufig nur in abgelegenen Gebieten ohne alternativen RTK-Anbieter eingesetzt.